If you know the device type, its configuration, and how it was installed, you may know which parameter to choose for the sensor in Wialon. But if you have just started working with Wialon and have doubts, this article can help you select a parameter based on how other users usually do it.
General recommendations
You can find the list of parameters and their description on the page of a specific device on wialon.com in the Hardware section. To do this, enter the desired device model in the Search hardware line. You can also select one of the categories of hardware types and find the desired model on the list. Then, on the hardware page, go to the Parameters tab (an example of such a page for WiaTag).
- In most cases, you can understand the value of a parameter by its English name. For example, the fuel_lvl parameter will most likely display the fuel level value, the total_mileage parameter — mileage sensor values, and so on. Parameter names received from CAN bus usually begin with the prefix can.
- Parameters sent by the device can be described in the hardware documentation. As a rule, documentation is available on the manufacturer's website.
- There is a list of virtual parameters defined in the system by default and suitable for almost any type of hardware:
- speed — speed of movement;
- altitude — height above sea level;
- sats — number of satellites;
- course — direction of movement;
- lat — latitude;
- lon — longitude;
- time — UNIX time of the message;
- regtime — time of the message registration on the server.
The method for searching and checking the selected parameter depends on the type of sensor in which it is used. Below, we’ll cover a few examples for the most commonly used types of sensors.
Engine ignition sensor
Engine ignition sensor is a digital sensor that indicates whether the engine is running or not. When the value of a digital sensor is zero, it is considered off, and when the value is non-zero, the sensor is considered on.
One of the digital inputs can be used as a parameter for the Engine ignition sensor (the I/O format parameter at the end of messages). I/O describes the state of all digital inputs and outputs simultaneously, and you can use it to determine the state of a particular digital input inN (the logic for selecting the input number N is described in another article).
You can also try to create an engine ignition sensor based on the external voltage parameter (usually named pwr_ext). In this case, you need to create the Calculation table in the sensor properties. The user guide provides an example of such a table. When using this example, you only need to change the voltage threshold at which the ignition will be considered on.
Practical method for selecting and checking a parameter
- Turn off the engine and wait for a few messages from the tracker.
- Start the engine and wait for a few more messages.
- Compare the messages received in points 1 and 2. If there was an abrupt change of only one parameter, it is most likely that it will indicate the ignition status. If several parameters changed, you can select the desired one using the additional check described in the following point.
- Examine the messages with non-zero speed. It is assumed that the ignition is on when there is speed, as well as in several messages before and after the speed exists. At the same time, it is recommended to consider intervals with a duration of at least five minutes, since some trackers can change the mode of sending messages after the start and the end of the movement.
Mileage sensors
Currently, Wialon has two sensors for tracking mileage:
- Mileage sensor shows the entire mileage of the unit since the sensor was installed.
- Relative odometer shows the mileage between the current and previous messages.
Both mileage sensors use kilometers (or miles) as measuring units. If the incoming parameter has other measuring units, you should apply a coefficient for converting incoming values to kilometers (or miles). For example, if the can_odo parameter displays the value in meters, then in the Parameter line in the sensor parameters, you will need to write the following formula to convert to kilometers: can_odo/const1000
Practical method for selecting and checking a parameter
You can use the Distance tool to check whether the parameter for Mileage sensor or Relative odometer is selected correctly. The parameter values and the distance measured between two messages most often do not completely coincide, but are comparable. This is due to the fact that the Distance tool mathematically calculates the distance between two points with the selected coordinates, and sensors usually calculate kilometers traveled based on the number of wheel rotations and its diameter.
You can use the parameter in the Mileage sensor if
- its value does not change when the unit stands;
- its value increases when the unit is moving;
- the difference of its values in two adjacent messages is comparable with the value obtained by using the Distance tool.
You can use the parameter in the Relative odometer if
- it is zero when the unit stands;
- it has a positive value when the unit is moving;
- it has approximately equal values when the unit is moving at the same speed;
- its value is comparable with the value obtained by using the Distance tool.
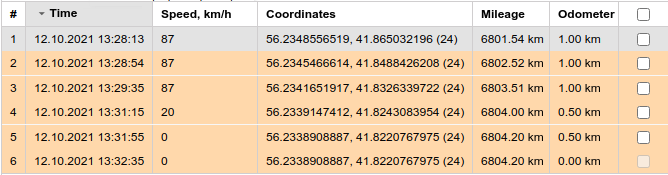
Messages with the following parameters are received from the unit:
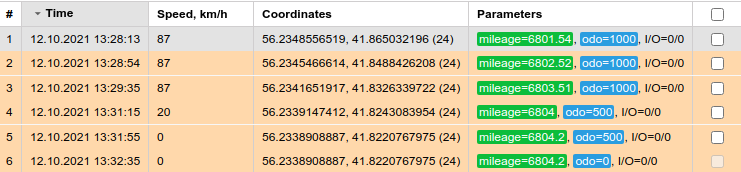
Create a Mileage sensor based on the mileage parameter, as it constantly increases while moving and does not drop to zero during a stop.
Create a Relative odometer based on the odo parameter, as it has different values while moving and drops to zero during a stop. However, its value seems too high, so try using the odo/const1000 formula.
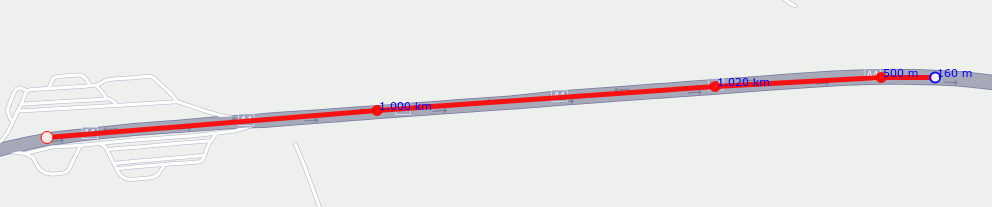
Measure the unit mileage between several pairs of messages using the Distance tool by placing the measured segments on top of the track.
Compare the obtained results:
| № | Mileage sensor | Difference with the previous value by the mileage sensor | Relative odometer | The Distance tool |
|---|---|---|---|---|
| 1 | 6801.54 km | – | 1.00 km | – |
| 2 | 6802.52 km | 6802.52 - 6801.54 = 0.98 km | 1.00 km | 1.000 km |
| 3 | 6803.51 km | 6803.51 - 6802.52 = 0.99 km | 1.00 km | 1.020 km |
| 4 | 6804.00 km | 6804.00 - 6803.51 = 0.49 km | 0.50 km | 0.500 km |
| 5 | 6804.20 km | 6804.20 - 6804.00 = 0.20 km | 0.50 km | 0.160 km |
| 6 | 6804.20 km | 6804.20 - 6804.20 = 0.00 km | 0.00 km | - |
The values are approximately equal, therefore, we can assume that the parameters for both sensors are selected correctly.
Please note that different sensors may have different accuracy. In this case, in the Mileage counter and Trip Detector, it’s recommended to use the sensor that sends readings closest to the expected ones.
Fuel sensors
Currently, Wialon has several types of fuel sensors:
- Absolute fuel consumption sensor (AbsFCS) shows the fuel consumption for the entire period of unit operation. Therefore, to obtain data on the fuel consumption for a specific period, you should use the following algorithm: calculate the difference in sensor readings at the end and the beginning of the considered interval.
- Instant fuel consumption sensor (InsFCS) shows the amount of consumed fuel since the previous measurement (message). Therefore, to obtain data on the fuel consumption for a specific period, you should use the following algorithm: calculate the sum of the sensor readings in all messages in the considered interval.
- Impulse fuel consumption sensor (ImpFCS) — the operating principle of this sensor is similar to Instant fuel consumption sensor.
- Fuel level sensor (FLS) is designed to calculate the amount of fuel in the tank. You can use it to calculate fuel consumption, as well as control fuel drains and fillings.
- Impulse fuel level sensor (ImpFLS), like the previous sensor, is designed to calculate the amount of fuel in the tank. You can use it to calculate fuel consumption, as well as control fuel drains and fillings. The difference from FLS is that the data from the previous message is used in the calculation, and the difference in the impulse values of two adjacent messages is divided by the time difference between them. This type of sensor is almost never used in practice – instead, most users prefer a traditional FLS.
Fuel information can be contained in parameters with the following names: fuel_lvl, fuel_used, cons_total, can_fuel, rs485_lls, adc1, adc2, etc.
You should select the sensor type based on how the parameter value changes. Let’s consider the different behavior of parameters below.
AbsFCS
You can use the parameter in the Absolute fuel consumption sensor if
- its value does not change when the engine is off;
- its value increases when the engine is running;
- its value increases faster when driving or operating under a load than when stopped or with no load.
InsFCS and ImpFCS
You can use the parameter in the Instant fuel consumption sensor or Impulse fuel consumption sensor if
- it is zero when the engine is off;
- it has a positive value when the engine is running;
- it has approximately equal values when the unit is moving at the same speed or operating under the same load.
FLS
You can use the parameter in the Fuel level sensor if
- its value does not change when the engine is off;
- its value gradually decreases when the engine is running;
- its value decreases faster when driving or operating under a load than when stopped or with no load;
- its value fluctuates around the actual value during engine operation and movement;
- its value increases sharply during fuel filling.
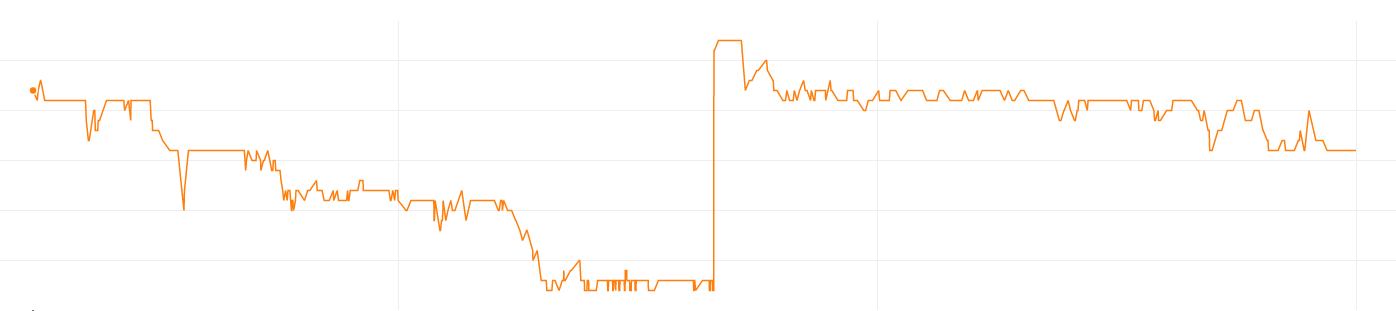
Below is an example of the FLS parameter changing chart, which covers the trip and filling intervals.